توضیحات
شبیه سازی ANFIS برای ربات دو درجه آزادی در متلب
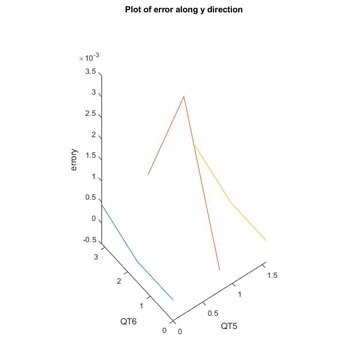
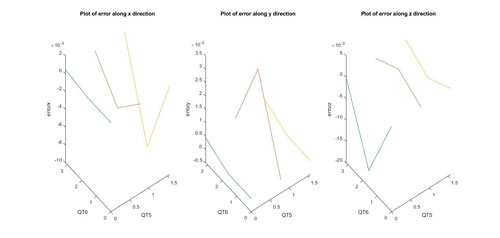
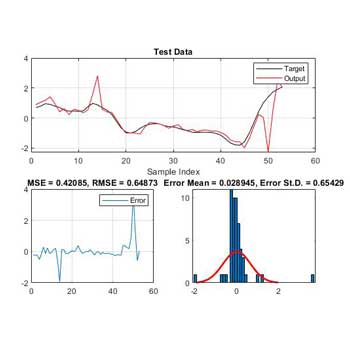
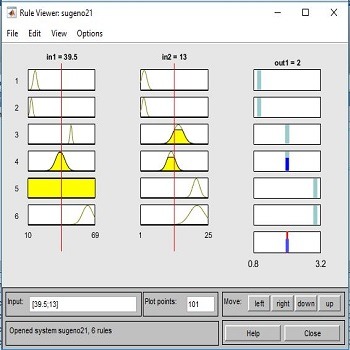
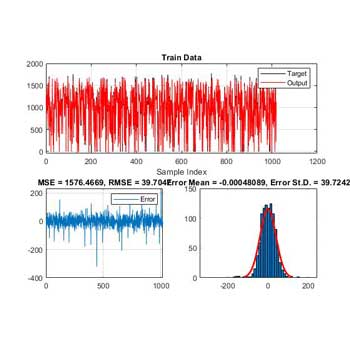
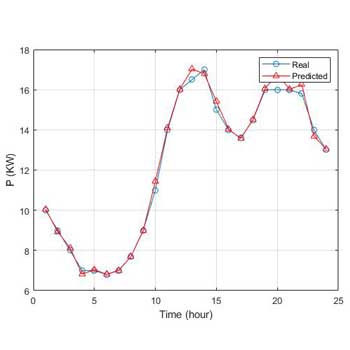
در این پروژه از تابع anfis برای ایجاد یک شبکه عصبی برای حل مسئله سینماتیک معکوس استفاده می شود.
سینماتیک معکوس
در انیمیشن کامپیوتری و رباتیک ، سینماتیک معکوس عبارت است از روند ریاضی محاسبه پارامترهای متغیر مشترک لازم برای قرار دادن انتهای یک زنجیره سینماتیک مانند دستگیره روبات یا اسکلت شخصیت انیمیشن ، در یک موقعیت خاص و جهت گیری نسبت به شروع زنجیر.
با توجه به پارامترهای مشترک ، موقعیت و جهت گیری انتهای زنجیره ، به عنوان مثال دست کاراکتر یا روبات معمولاً با استفاده از چندین فرمول مثلثاتی ، یک فرآیند شناخته شده به عنوان kinematics مستقیم محاسبه می شود. با این حال ، عملکرد معکوس به طور کلی بسیار چالش برانگیز است.(منبع)
شبیه سازی ANFIS برای ربات دو درجه آزادی در متلب
توسط متخصصان گروه پروماد انجام شده است.فایلهای نرم افزاری پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.