توضیحات
شبیه سازی کنترل آونگ معکوس با PID و LQR در متلب
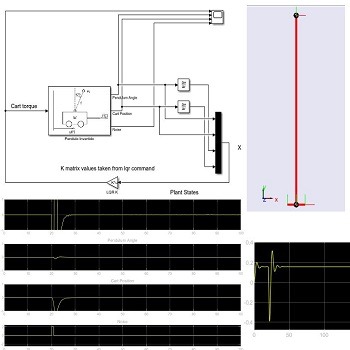
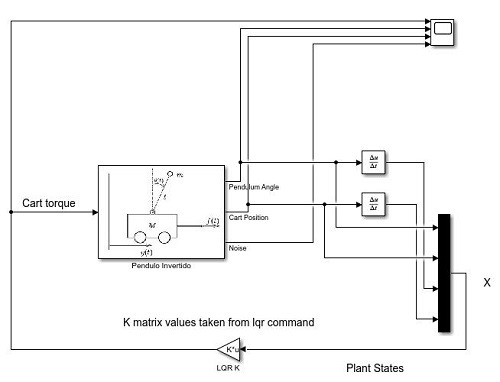
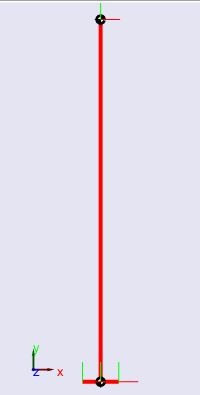
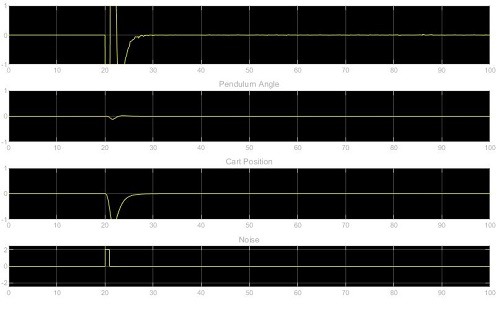
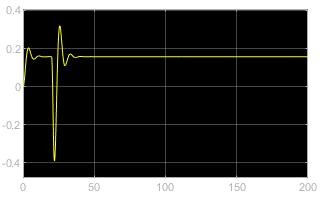
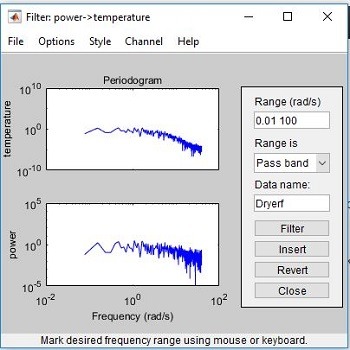
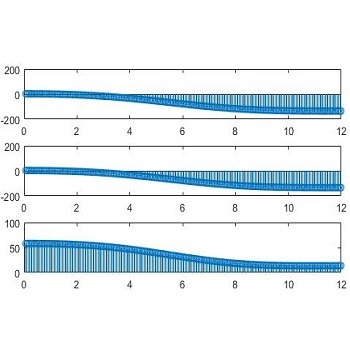
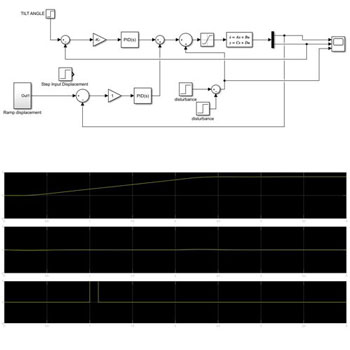
در این پروژه شبیه سازی کنترل آونگ معکوس با PID و LQR در متلب انجام شده است. آونگ (پاندول) معکوس ساده با کنترل کننده LQR، PID و جعبه ابزار SimMechanics پیاده سازی شده است.این پروژه کنترل ساده آونگ معکوس با LQR را نشان می دهد. این پروژه با SimMechanics مدلسازی شده و کنترل با دستور LQR ساخته شده است.
شبیه سازی کنترل آونگ معکوس با PID و LQR در متلب
توسط متخصصان گروه پروماد انجام شده است.فایلهای نرم افزاری پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.





دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.