توضیحات
شبیه سازی فیلتر کالمن توسعه یافته برای GPS در متلب
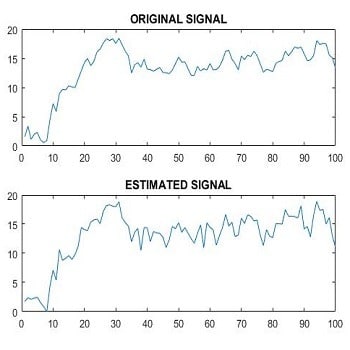
در این پروژه شبیه سازی فیلتر کالمن توسعه یافته برای GPS در متلب انجام شده است. یک تابع آسان برای پیاده سازی فیلتر کالمن توسعه یافته Extended Kalman Filtering با مثال موقعیت یابی GPS پیاده سازی شده است. این پروژه حاوی نمایش مختصری از اصول و الگوریتم های فیلتر کالمن (EKF) و سیستم موقعیت جهانی (GPS) است. این فایل برای ارائه یک EKF نسبتاً آسان طراحی شده است. همچنین به عنوان مقدمه ای کوتاه بر الگوریتم های فیلتر کالمن برای GPS عمل می کند. در مثال برای EKF، ما داده های خام و راه حل برای موقعیت یابی GPS را با استفاده از روش EKF و حداقل مربع ارائه می دهیم.
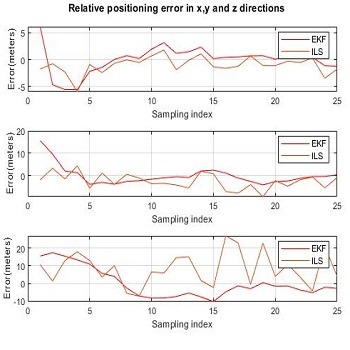
این فایل نمونه ای از استفاده از تابع Extended_KF با استفاده از ناوبری GPS را ارائه می دهد. شبه برد و موقعیت ماهواره ای یک گیرنده GPS در یک مکان ثابت برای مدت ۲۵ ثانیه ارائه شده است. برای این کار از حداقل مربعات و Extended KF استفاده می شود.
در ادامه به توضیح مختصری از اصول GPS می پردازیم. برای اطلاعات بیشتر به مرجع [۲] مراجعه کنید. سیستم موقعیت یاب جهانی (GPS) یک سیستم ناوبری مبتنی بر ماهواره است که دسترسی تجهیزات مناسب به اطلاعات موقعیت یابی را برای کاربر فراهم می کند. متداولترین روشهای مورد استفاده برای موقعیتیابی GPS، روشهای حداقل مربعی تکراری (ILS) و فیلتر کالمن (KF) هستند.
هر دوی آنها بر اساس معادله شبه برد هستند:
rho = || Xs – X || + b + v
که در آن Xs و X به ترتیب موقعیت ماهواره و گیرنده را نشان می دهند و || Xs – X || نشان دهنده فاصله بین آنها است. b نشان دهنده بایاس ساعت گیرنده است و باید همراه با موقعیت گیرنده حل شود. rho اندازهگیری است که توسط گیرنده برای هر ماهواره ارائه میشود و v نویز اندازهگیری شبه برد است که به عنوان نویز سفید مدلسازی میشود.
۴ مجهول وجود دارد: مختصات موقعیت گیرنده X و بایاس ساعت b.
ILS می تواند برای محاسبه این مجهولات استفاده شود و در این مثال به عنوان مقایسه پیاده سازی شده است. در راه حل KF، ما از فیلتر کالمن توسعه یافته (EKF) برای مقابله با غیر خطی بودن معادله شبه برد و یک مدل CV (سرعت ثابت)[۱] به عنوان مدل فرآیند استفاده می کنیم.
منابع:
۱٫ R G Brown, P Y C Hwang, “Introduction to random signals and applied Kalman filtering: with MATLAB exercises and solutions”,1996
۲٫ Pratap Misra, Per Enge, “Global Positioning System Signals, Measurements, and Performance(Second Edition)”,2006
شبیه سازی فیلتر کالمن توسعه یافته برای GPS در متلب
توسط متخصصان گروه پروماد انجام شده است.فایلهای نرم افزاری پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.
اگر این محصول، پروژه مورد نظر شما نمی باشد، می توانید از طریق لینک زیر سایر پروژه های مشابه را مشاهده کنید.
سایر پروژه های مشابه



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.