توضیحات
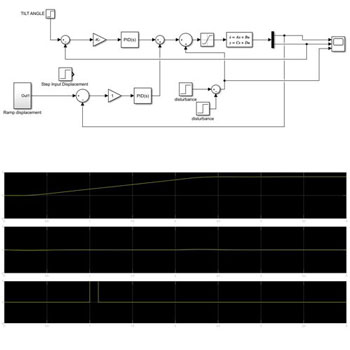
شبیه سازی تنظیم کنترل کننده PID با روش زیگلر نیکولز در متلب
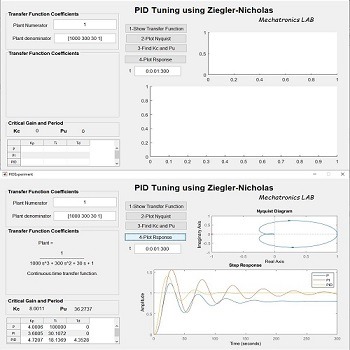
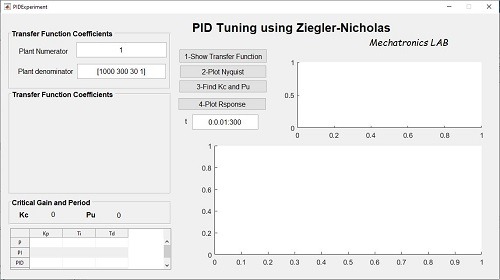
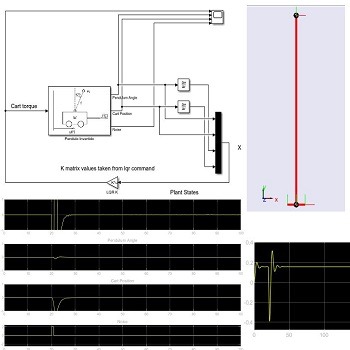
در این پروژه شبیه سازی تنظیم کنترل کننده PID با روش زیگلر نیکولز در متلب انجام شده است. رابط کاربری گرافیکی GUI برای یافتن آسان پارامترهای P، PI و PID با استفاده از Ziegler Nichols زیگلر نیکولز ایجاد شده است.
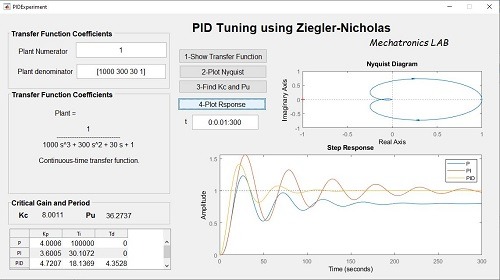
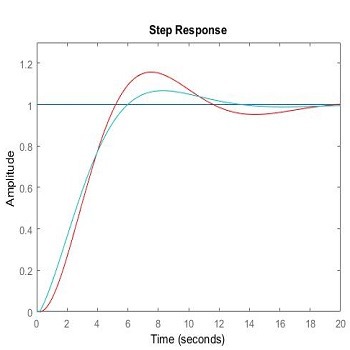
هدف از این پروژه ارائه ابزاری آسان برای یافتن پارامترهای P، PI و PID با استفاده از Ziegler Nichols با ارائه ضرایب صورت و مخرج مدل ریاضی در دامنه لاپلاس است. Kc بهره بحرانی و Pu دوره نهایی را از نمودار Nyquist تعیین میکند و از این رو مقادیر را برای P، PI و PID محاسبه میکند. پس از ترسیم پاسخ های حلقه بسته مقادیر محاسبه شده P، PI و PID دوره ترسیم نیز قابل تنظیم است. برای اجرای این پروژه کافی است فایل pidexperiment.m را اجرا کنید.
روش تنظیم Ziegler-Nichols یک روش اکتشافی برای تنظیم یک کنترلر PID است. این توسط John G. Ziegler و Nathaniel B. Nichols توسعه داده شد. با صفر کردن پارامترهای I (انتگرال) و D (مشتق) انجام می شود. سپس پارامتر «P» (متناسب)، Kp افزایش می یابد (از صفر) تا زمانی که به بهره نهایی Ku برسد، که در آن خروجی حلقه کنترل دارای نوسانات پایدار و ثابتی است. سپس Ku و دوره نوسان Tu برای تنظیم پارامترهای P، I و D بسته به نوع کنترل کننده مورد استفاده و رفتار مورد نظر استفاده می شوند.
شبیه سازی تنظیم کنترل کننده PID با روش زیگلر نیکولز در متلب
توسط متخصصان گروه پروماد انجام شده است.فایلهای نرم افزاری پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.