توضیحات
شبیه سازی کنترل PD کوادروتور در متلب
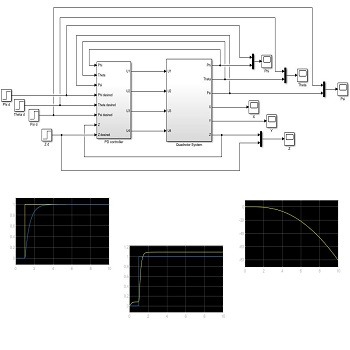
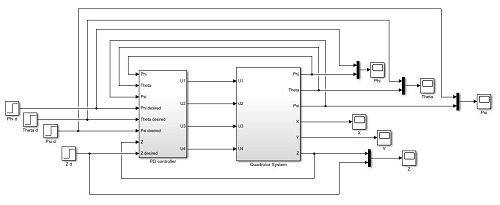
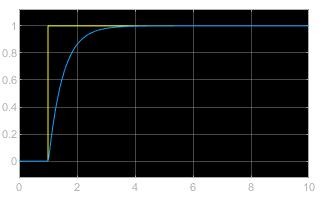
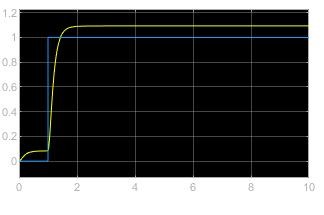
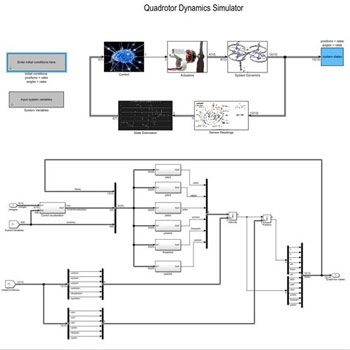
در این پروژه شبیه سازی کنترل PD کوادروتور در متلب انجام شده است. این فایل شامل شبیه سازی Simulink کنترل PD یک کوادروتور می باشد. کنترل PD برای کنترل کوادروتور در شرایط بدون اختلال کافی است.
امگا “بزرگ” که در این مدل استفاده شده در واقع “گاما” است که در دینامیک کوادروتور یافت می شود. کنترل ها را می توان از روی سرعت روتورها محاسبه کرد، بنابراین با استفاده از همان معادلات به صورت معکوس می توانیم سرعت روتورها را خارج از کنترل ها پیدا کنیم (برای حل سرعت روتورها با استفاده از معادلات بالا، ۴ معادله با ۴ مجهول).
گاما تأثیر سرعت روتور بر روی سیستم است. به طور کلی، هیچ سنسوری روی کوادروتور برای اندازه گیری سرعت روتورهای آن قرار نمی گیرد، بنابراین نمی توانیم گاما را به صورت عملی محاسبه کنیم و به عنوان یک اختلال در نظر گرفته می شود. گاما با استفاده از سرعت چهار روتور به صورت زیر محاسبه می شود:
گاما = omega1 – omega2 + omega3 – omega4: اثر حاصل از همه روتورها.
کاری که در اینجا انجام شده این است که که مربع امگا هر روتور محاسبه شده، از مربع امگا برای محاسبه گاما استفاده شده، سپس کنترل ها دوباره محاسبه میشوند.
برای اجرای این پروژه ابتدا فایل Quadparameters.m را اجرا کرده و سپس فایل سیمولینک PDQuadrotor.mdl را ران کنید.
شبیه سازی کنترل PD کوادروتور در متلب
توسط متخصصان گروه پروماد انجام شده است.فایلهای نرم افزاری پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.