در این پروژه شبیه سازی کنترل PD سیستم توپ و تیر در متلب انجام شده است. نمایش تعاملی کنترل بازخورد برای سیستم گوی و میله با کنترل تناسبی مشتقی (PD) پیاده سازی شده است.
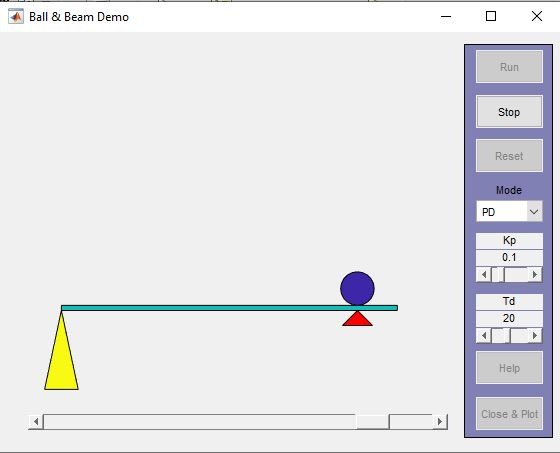
در یک نمایش تعاملی از کنترل تناسبی (P) و تناسبی مشتقی (PD) برای آزمایش توپ و تیر میتوانید از این پروژه استفاده کنید. آن را میتوانید با وارد کردن “Ball beam” در خط فرمان بدون هیچ آرگومان دیگری شروع کنید. کنترلرهای P و PD زاویه تیر را در پاسخ به موقعیت توپ روی تیر دستکاری می کنند. نقطه تنظیم با یک نشانگر قرمز نشان داده می شود و با استفاده از نوار لغزنده در پایین شکل تنظیم می شود. بهره کنترل، Kp، و ثابت زمانی مشتق، Td، توسط لغزنده های واقع در کنترل پنل سمت راست تنظیم می شوند.
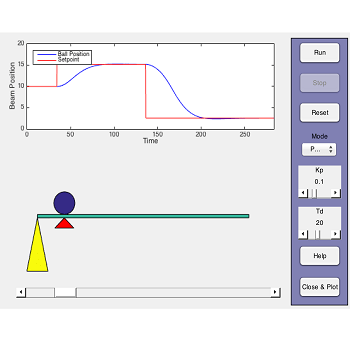
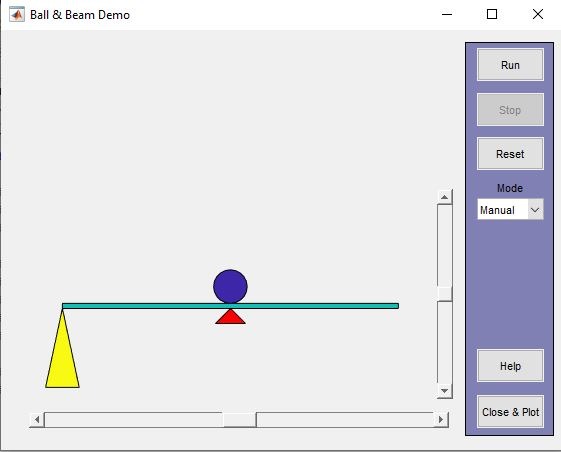
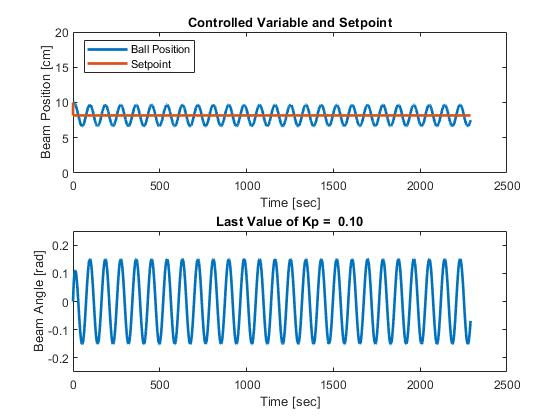
برای اجرای پروژه فقط کافی است فایل ballbeam.m را اجرا کنید. نوار لغزنده پایین، نقطه تنظیمی را که با نشانگر قرمز نشان داده شده است، تنظیم می کند. لغزنده عمودی انتهای پرتو را به سمت بالا و پایین حرکت می دهد. برای شروع شبیه سازی، دکمه Run را فشار دهید. هنگامی که انتهای تیر را بالا و پایین میبرید، توپ روی تیر به جلو و عقب میغلتد. شبیهسازی با فشار دادن دکمه «توقف» یا زمانی که توپ از هر دو انتهای پرتو خارج میشود، متوقف میشود. کنترل پرتو را می توان در هر زمان در طول شبیه سازی به صورت خودکار تناسبی یا مشتقی تناسبی قرار داد. با انتخاب این حالت ها، لغزنده هایی برای تنظیم بهره متناسب و ثابت زمانی مشتق ظاهر می شود. با تغییر پارامترهای کنترلی، کاربر می تواند طیف وسیعی از رفتارها را در پاسخ به تغییرات و اختلالات نقطه تنظیم بررسی کند. پنجره شبیه سازی را می توان با کلیک بر روی دکمه “توقف” و سپس “بازنشانی” راه اندازی مجدد کرد. با بستن پنجره، یک پنجره شکل جدید ظاهر می شود که خلاصه ای از شبیه سازی را نشان می دهد. مقادیر دقیق موقعیت، زاویه پرتو، نقطه تنظیم و پارامترهای کنترلی با استفاده از دستور «ballbeam.mat» بازیابی میشوند.
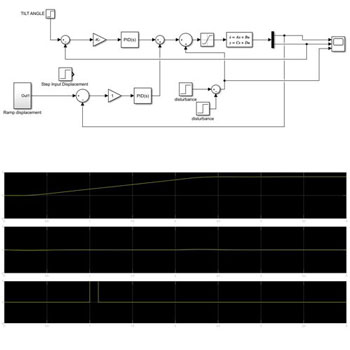
کد Matlab زیر نمودارهای نشان داده شده در پایان شبیه سازی را ایجاد می کند.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.