توضیحات
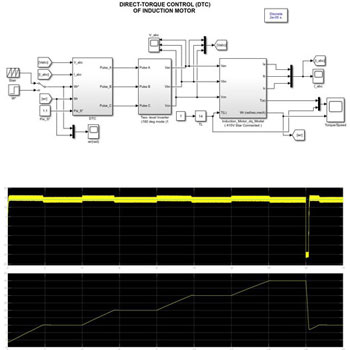
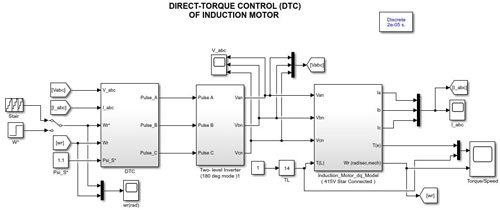
شبیه سازی کنترل مستقیم گشتاور موتور القایی در متلب
در این پروژه استراتژی کنترل مستقیم گشتاور برای کنترل سرعت موتور القایی ۲٫۲ کیلو وات در شرایط مختلف گشتاور اجرا شده است.
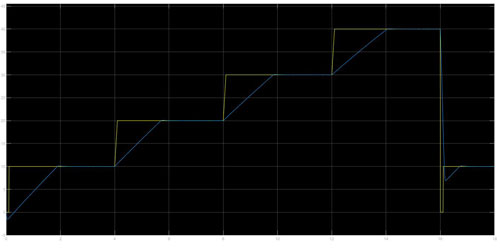
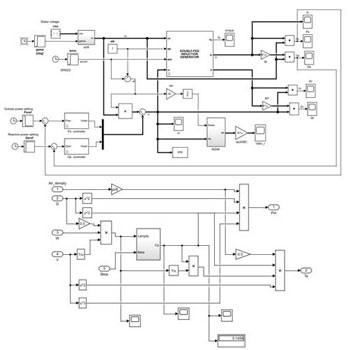
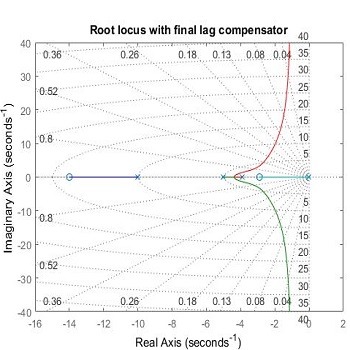
موتور القایی ۵۰ هرتز ، ۴ قطبی ، ۲٫۲ کیلو وات در قاب dq مدل سازی شده است. گشتاور دارای مقدار ۱۴ نیوتن متر است. و جریان نامی برابر با ۴٫۴ آمپر (r.m.s) ، در بار کامل. در بار کامل ، دستگاه دارای سرعت ۱۴۴۰ rpm با استفاده از استراتژی کنترل مستقیم گشتاور ، سرعت دستگاه در حلقه بسته کنترل می شود. ولتاژ در حال اجرا و بازخوردهای جریان گرفته شده ، به قاب آلفا-بتا ثابت تبدیل می شوند و از آنجا گشتاور الکترومغناطیسی ، شار استاتور و بخش شار چرخش محاسبه می شود. سرعت دستگاه برای مقایسه آن با سرعت مرجع دوباره تغذیه می شود.
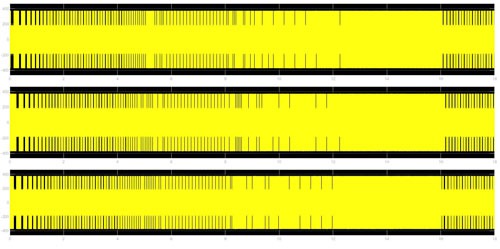
کنترل کننده PI برای تولید گشتاور مرجع مناسب تنظیم شده است که سپس با گشتاور الکترومغناطیسی مقایسه می شود. شار استاتور توسط یک کنترل کننده هیسترزیس دو سطح کنترل می شود تا در طول کار دستگاه ، آن را در ۱٫۱ Wb نگه دارد. به طور مشابه ، یک کنترل کننده گشتاور سه سطح نیز براساس تقاضای بار ، گشتاور الکترومغناطیسی را کنترل می کند. وضعیت شار گشتاور و استاتور به همراه اطلاعات مربوط به بخش ، انتخاب مناسب بردارهای فضای ولتاژ را امکان پذیر می کند. حالتهای سوئیچینگ مربوطه بردارهای فضای ولتاژ اینورتر منبع ولتاژ (VSI) را قادر می سازد تا ولتاژ ورودی موتور القایی را کنترل کند.
در این روش سرعت ردیابی می شود و تقاضای بار نیز برطرف می شود. در حال حاضر در سراسر شبیه سازی جریان سینوسی و در محدوده جریان نامی مشاهده می شود.

شبیه سازی کنترل مستقیم گشتاور موتور القایی در متلب
توسط متخصصان گروه پروماد انجام شده است.فایلهای نرم افزاری پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.