توضیحات
مثالی از شبیه سازی کنترل مد لغزشی در متلب
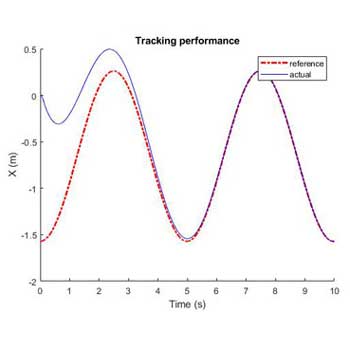
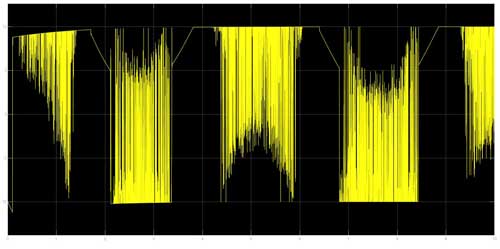
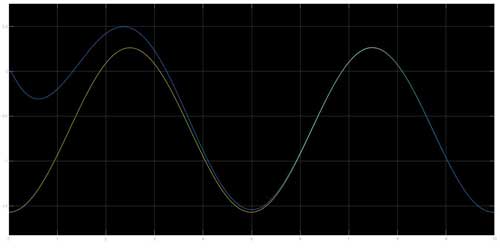
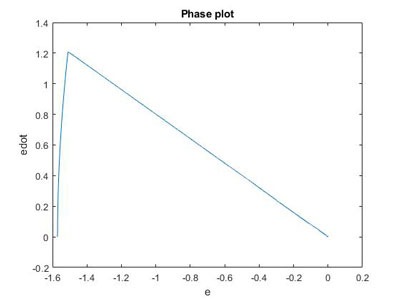
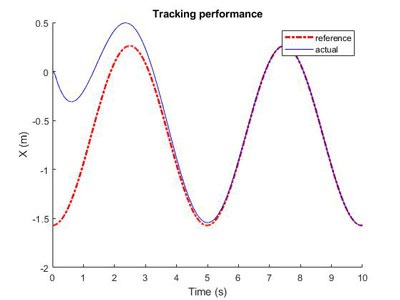
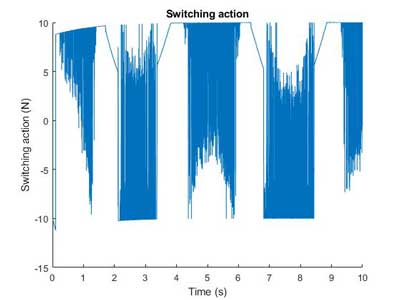
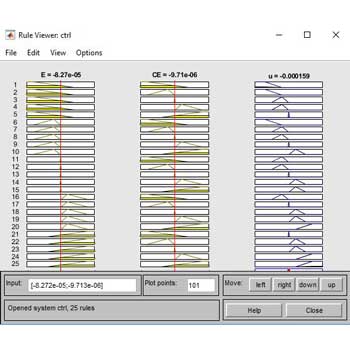
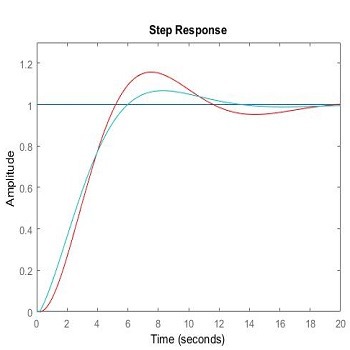
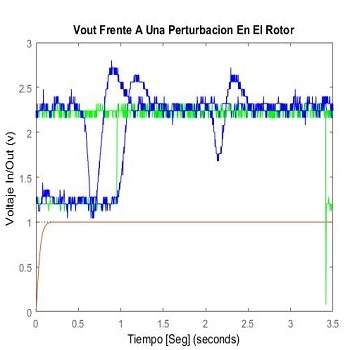
در این پروژه مثالی از کنترل مد لغزشی (SMC) شبیه سازی شده است. این سیستم یک سیستم پویا مرتبه دوم است که از یک جرم و یک دمپر تشکیل شده است. SMC با اجرای شرایط مرزی در اطراف سطح لغزش مجهز به مکانیزم کاهش است. تصاویر زیر خروجی این سیستم کنترلی را نشان میدهد که هم دارای فایل سیمولینک و هم دارای فایل کدنویسی(mفایل) است:
کنترل مد لغزشی(SMC)
در سیستم های کنترل ، کنترل مد لغزشی (SMC) یک روش کنترلی غیرخطی است که با استفاده از یک سیگنال کنترل ناپیوسته (یا دقیق تر ، یک سیگنال کنترل تنظیم شده دارای ارزش) دینامیک سیستم غیرخطی را تغییر می دهد. قانون کنترل بازخورد حالت تابعی از زمان پیوسته نیست. در عوض ، می تواند از یک ساختار مداوم به ساختار دیگر بر اساس موقعیت فعلی در فضای حالت تغییر کند. از این رو ، کنترل مد لغزشی یک روش کنترل ساختار متغیر است. ساختارهای کنترل چندگانه به گونه ای طراحی شده اند که مسیرها همیشه به سمت یک منطقه مجاور با ساختار کنترل متفاوت حرکت می کنند ، بنابراین مسیر نهایی به طور کامل در یک ساختار کنترل وجود نخواهد داشت. درعوض ، در امتداد مرزهای ساختارهای کنترل کشیده خواهد شد. حرکت سیستم به هنگام کشیدن در امتداد این مرزها ، حالت لغزشی نامیده می شود و مکان هندسی متشکل از مرزها ، سطح لغزش(هایپر) نامیده می شود. در چارچوب نظریه کنترل مدرن ، هر سیستم ساختار متغیر ، مانند یک سیستم تحت SMC ، ممکن است به عنوان یک مورد خاص از یک سیستم دینامیکی ترکیبی مورد بررسی قرار گیرد ، زیرا این سیستم هر دو از طریق یک فضای حالت پیوسته جریان می یابد ، بلکه از طریق حالت های کنترل گسسته های مختلف نیز حرکت می کند.(منبع)
مثالی از شبیه سازی کنترل مد لغزشی در متلب
توسط متخصصان گروه پروماد انجام شده است.فایلهای نرم افزاری پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.