توضیحات
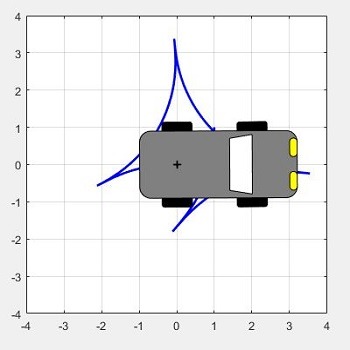
شبیه سازی پارک اتوماتیک خودرو با روش iLQG در متلب
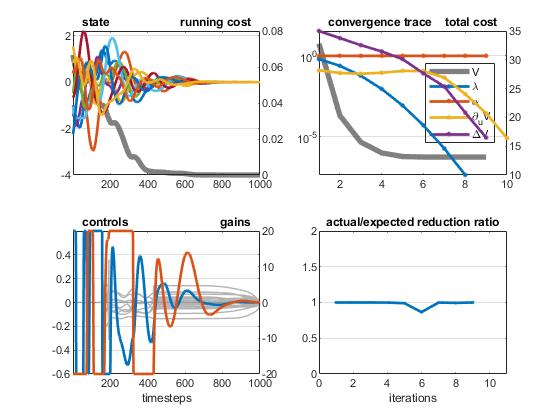
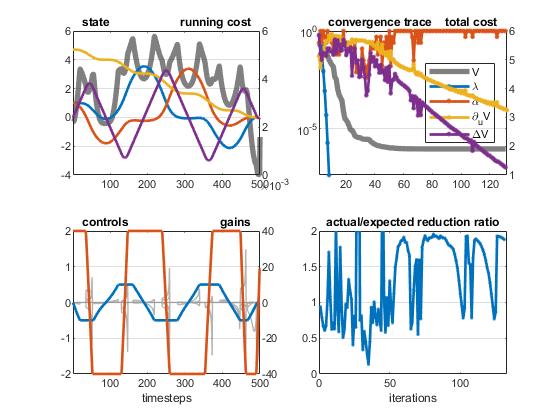
در این پروژه شبیه سازی پارک اتوماتیک خودرو با روش iLQG در متلب انجام شده است. بهینه سازی مسیر iLQG/DDP پیاده سازی شده است. مسئله کنترل بهینه افق محدود قطعی با iLQG/DDP حل شده است. مسئله کنترل بهینه افق محدود قطعی با الگوریتم iLQG (گاوسی خطی درجه دوم تکراری) یا DDP اصلاح شده (برنامه نویسی دینامیکی دیفرانسیل) حل شده است. شامل دو نسخه نمایشی، یک مسئله محدود کنترل خطی و یک مسئله پارک خودرو است.
برای جزئیات به Tassa, Mansard and Todorov, ‘Control-Limited Differential Dynamic Programming’, ICRA 2014 مراجعه کنید.
شبیه سازی پارک اتوماتیک خودرو با روش iLQG در متلب
توسط متخصصان گروه پروماد انجام شده است.فایلهای نرم افزاری پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.