
توضیحات
طراحی و مدلسازی ربات هگزاپاد با سالیدورک
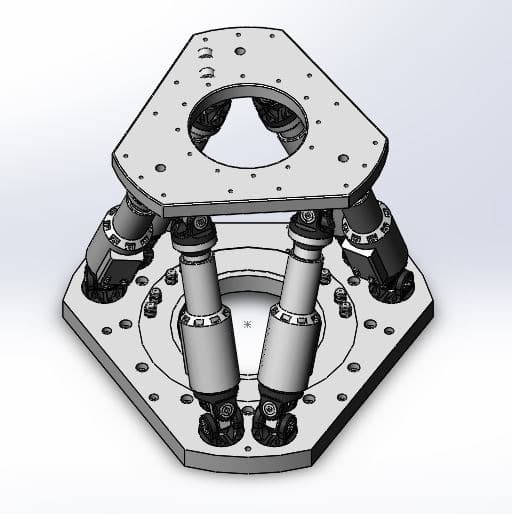
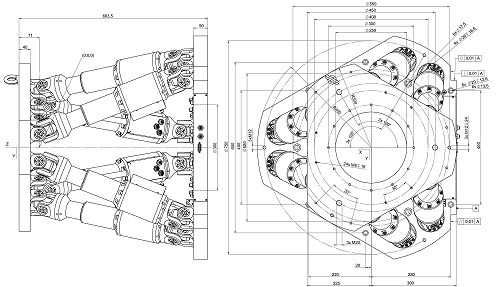
مکانیزم استوارت یک ربات موازی شامل دو جسم صلب است: یک سکوی متحرک و یک بستر پایه که موقعیت و جهت بستر پایه ثابت بوده و موقعیت و جهت سکوی متحرک با تغییر طول بازوها تغییر مینماید. این دو جسم با شش بازو به یکدیگر متصل هستند که این اتصالات میتوانند مفصل کروی یا یونیورسال باشند. به صورت کلی برای یک مجموعه طول داده شده برای بازوها، موقعیت و جهت سکوی متحرک قابل تعیین است. در دو دههٔ گذشته مکانیزم استوارت موضوع اصلی بسیاری از متون مربوط به رباتهای موازی بودهاست و در رشتههای مختلف مهندسی کاربرد داشتهاست. مهمترین مزیت مکانیزم استوارت در مقایسه با مکانیزمهای سریال، سفتی ذاتی و نسبت بالای بار به وزن آن است.(منبع: ویکی پدیا)
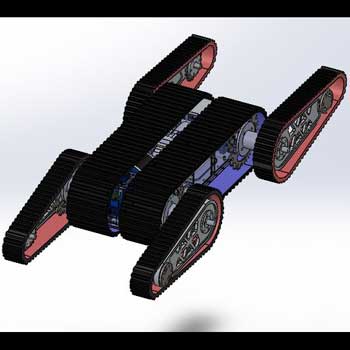
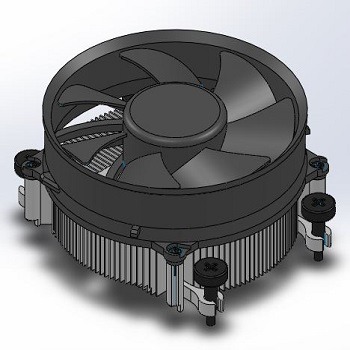
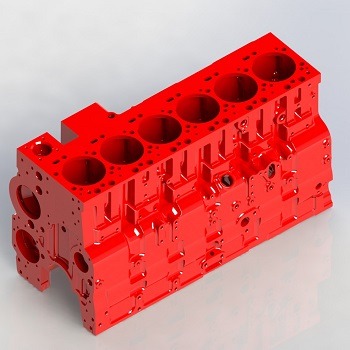
در این پروژه یک ربات موازی هگزاپاد یا مکانیزم استوارت با سالیدورک مدلسازی شده است که متشکل از تعداد ۲۲ پارت part و ۴ اسمبلی assembly است.
در مدلسازی ربات موازی همه قطعات آن مدلسازی شده است.
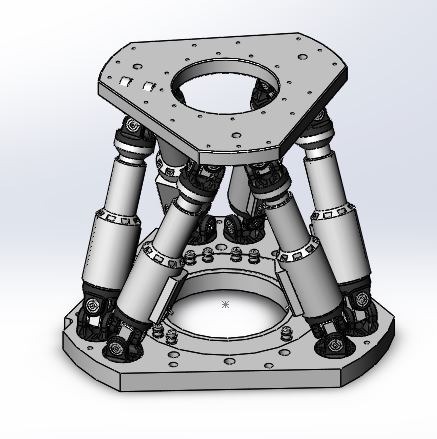
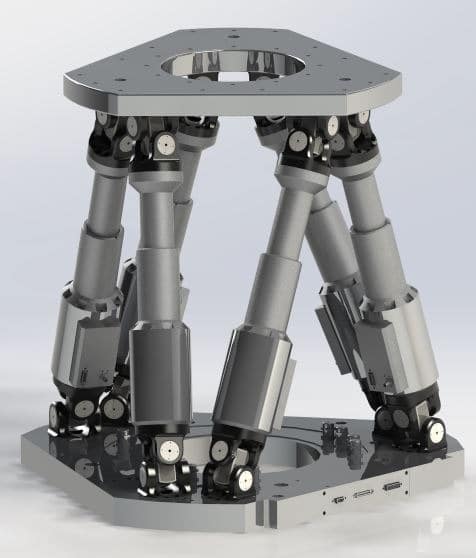
ربات موازی مدلسازی شده دارای قیود مکانیکی و حرکتی است به نحوی که با نزدیک کردن دو صفحه موازی هر شش پایه فشرده میشوند و برعکس.
تصاویر زیر مربوط به ربات موازی مدلسازی شده است:
طراحی و مدلسازی ربات هگزاپاد با سالیدورک توسط متخصصان گروه پروماد انجام شده است.فایلهای نرم افزاری پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.








دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.