


توضیحات
طراحی و مدلسازی بازوی رباتیک با سالیدورک
بازوی روباتیک نوعی بازوی مکانیکی، عموماً قابل برنامهریزی، است که کاربردهایی مشابه بازوی انسان دارد. بازوی رباتیک ممکن است خود یک ربات باشد یا بخشی از یک ربات پیچیدهتر باشد. اتصالات چنین بازویی آن چنانند که امکان جابجایی چرخشی (شبیه رباتهای بندی) یا انتقالی (خطی) را فراهم میکنند. اتصالات بازو میتوانند یک زنجیره حرکتی (به انگلیسی kinematic chain) را ایجاد کنند. قسمت انتهایی زنجیره حرکتی بازوی مکانیکی، تأثیرگذار نهایی (به انگلیسی end effector) نامیده میشود.تأثیرگذار نهایی، یا دست روباتیک، میتواند برای انجام هر وظیفه ای مثل جوشکاری، بستن، یا چرخاندن طراحی شود. برای مثال بازوی روبات در خط مونتاژ اتومبیل اعمالی مثل جوشکاری، چرخاندن و قرار دادن قطعات انجام میدهند.(منبع: ویکی پدیا)
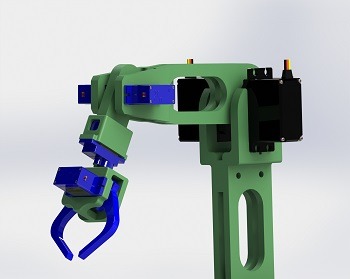
در این پروژه یک بازوی رباتیک همراه با پنجه یا دست رباتیک با سالیدورک طراحی و مدلسازی شده است. این بازوی رباتیک متشکل از تعداد ۴۰ پارت (part) و ۶ قطعه اسمبلی (assembly) است.
در مدلسازی بازوی رباتیک با سالیدورک قطعات الکترونیکی مانند میکرو و سرو موتور نیز گنجانده شده است.
بازوی رباتیک طراحی شده با سالیدورک دارای ۵ درجه زاویه آزادی است.
تصاویر زیر مربوط به تصاویر رندر گرفته شده از بازوی رباتیک مدلسازی شده است:



مدلسازی بازوی رباتیک با سالیدورک توسط متخصصان گروه پروماد انجام شده است.فایلهای نرم افزاری پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.







My assignment help –
سلام
؟آیا پروژه هگزاپاد هم کار میکنید
درضمن سایتتون فوق العادست
دوباره به سایتتون میام و
منتظر پاسخ هستم
با تشکر از سایت خوبتون