توضیحات
شبیه سازی کنترل موقعیت ربات با استفاده از کنترلر PID با متلب
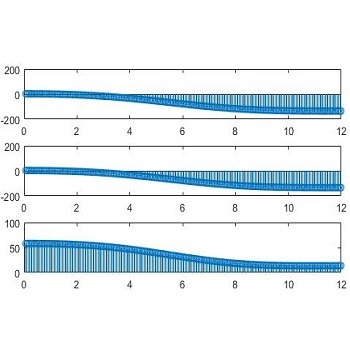
پروژه متلب زیر شامل کد و مثال های متلب است که برای کنترل موقعیت بازوی یک ربات با استفاده از کنترل کننده pid استفاده می شود. محاسبه گشتاور در ۳ مفصل ، زاویه ، شیب زاویه ای ، سرعت زاویه ای انجام شده است.(منبع)
در این پروژه ورودی های مختصات مبدا و مقصد بازوی ربات از شما گرفته میشود با تعیین سرعت جابجایی از مبدا تا مقصد، میتوانید محاسبات را مشاهده کنید.

شبیه سازی کنترل موقعیت ربات با استفاده از کنترلر PID با متلب توسط متخصصان گروه پروماد انجام شده است.فایلهای نرم افزاری پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.