







توضیحات
طراحی و مدلسازی ربات عملگر خطی
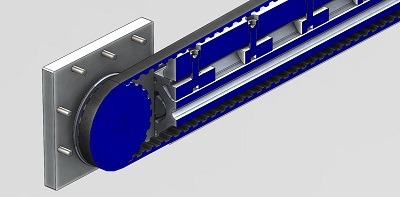
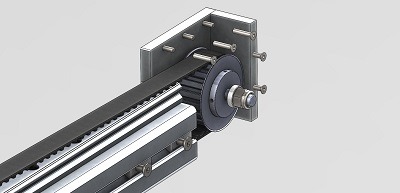
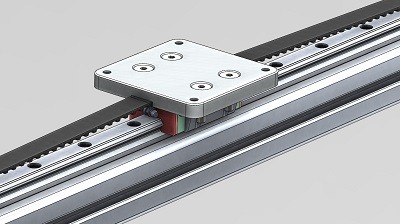
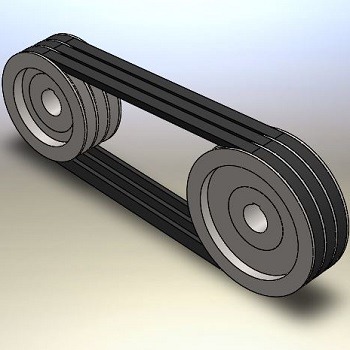
این ربات یک مکانیزم مکانیکی الکتریکی برای تامین حرکت خطی رفت و برگشتی است. دارای یک بدنه اصلی است که در دو سمت آن یک پولی نصب شده است. یکی از این پولی ها توسط موتور به حرکت درمی آید و دیگری هرزگرد است. ارتباط میان این دو پولی توسط تسمه تامین میشود. عملگر این ربات بر روی ریل راهنما به وسیله این تسمه به حرکت در می آید. طراحی و مدلسازی ربات عملگر خطی با سالیدورک توسط مجموعه پروماد برای دانشجویان مکانیک و مکاترونیک انجام شده است.
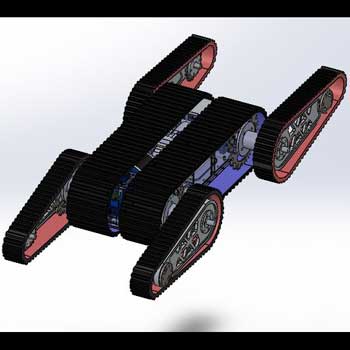
در این پروژه یک ربات عملگر خطی با سالیدورک طراحی و مدلسازی شده است که متشکل از ۴۰ پارت part و ۳ اسمبلی assembly است.
در مدلسازی ربات عملگر خطی همه قطعات آن مدلسازی شده است که عبارتند از:
- بدنه اصلی
- ریل راهنما
- عملگر
- پولی ها
- تسمه
- موتور
- کوپلینگ
- چرخ دنده
- شفت
- خار و پین و پیچ و مهره
- بلبرینگ
- تسمه
- و…
ربات عملگر خطی مدلسازی شده دارای قیود مکانیکی است و همه اجزا با استفاده از قید گذاری های ساده در کنار یکدیگر قرار گرفته اند.
تصاویر زیر مربوط به ربات عملگر خطی مدلسازی شده است:


طراحی و مدلسازی ربات عملگر خطی با سالیدورک
توسط متخصصان گروه پروماد انجام شده است.فایلهای نرم افزاری پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.








دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.