توضیحات
طراحی و مدلسازی چرخ ربات (مکانوم) با سالیدورک
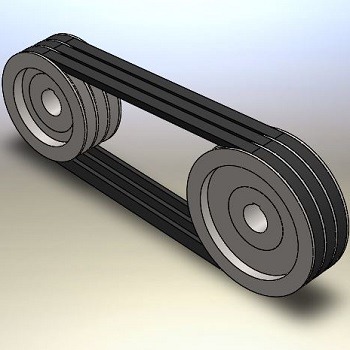
در این پروژه یک چرخ ربات (مکانوم) با سالیدورک طراحی و مدلسازی شده است که متشکل از ۸ فایل پارت part و ۲ فایل اسمبلی assembly است. این چرخ ربات (مکانوم) توسط مجموعه پروماد برای دانشجویان طراحی و مدلسازی شده است.
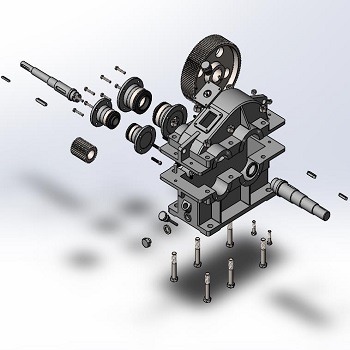
چرخ ربات (mecanum) مدلسازی شده با همه جزییات طراحی شده است. این چرخ مکانوم دارای بدنه، غلطک، شفت، پیچ و مهره و … می باشد.
چرخ ربات (مکانوم) مدلسازی شده از اجزای زیر تشکیل شده است:
- چرخدنده حلزونی
- شفت حلزونی
و…
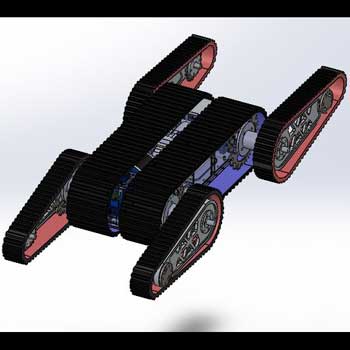
تصاویر زیر مربوط به چرخ mecanum مدلسازی شده است:


طراحی و مدلسازی چرخ ربات (مکانوم) با سالیدورک
توسط متخصصان گروه پروماد انجام شده است.فایلهای نرم افزاری پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.








نقد و بررسیها
هنوز بررسیای ثبت نشده است.