توضیحات
شبیه سازی ناوبری اتوماتیک خودرو با منطق فازی در متلب
در این پروژه شبیه سازی ناوبری اتوماتیک خودرو با منطق فازی در متلب انجام شده است. این مدلی است که از مجموعههای فازی نوع ۲ برای طراحی یک سیستم کنترلی استفاده میکند که تصمیمات آنی را برای هدایت یک وسیله نقلیه غیرهولونومیک مانند ماشین بدون سرنشین برای رسیدن به موقعیت پارک نهایی از موقعیت اولیه اتخاذ میکند. این مدل فقط در MATLAB توسعه داده شده است. توالی تصمیمات یک مانور پارک مانند برای رسیدن به مقصد نهایی با جهت گیری لازم ایجاد می کند. مدلی توسعه داده شده است که محدودیتهای واقعی خودرو را در نظر میگیرد تا به تست و بهینهسازی رفتارهای ادراکی و ناوبری کمک کند تا به سیستم کنترل در حال توسعه برای ناوبری مستقل رباتهای غیرهولونومیک کمک کند.
برای اجرای این پروژه فقط کافی است فایل autonavigator.m را اجرا کرده و پارامترهای لازم را تنظیم کنید. مابقی فایل ها توابعی هستند که بصورت اتوماتیک فراخوانی میشوند.

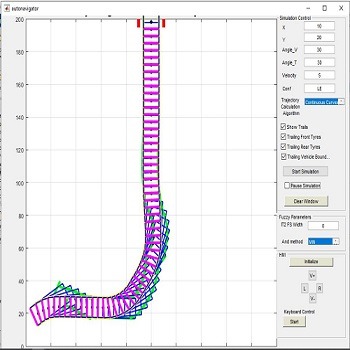
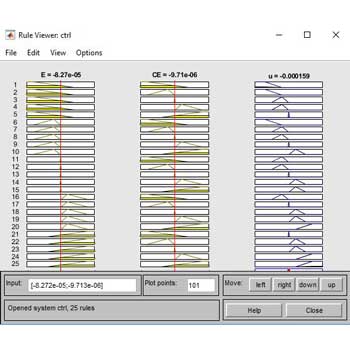
برای پارک خودرو روش های متفاوتی وجود دارد مانند استفاده از کنترل کننده های فازی , الگوریتم ژنتیک , شبکه های عصبی , پردازش تصویر , استفاده از سنسور و … که در این پروژه با استفاده از سیستم منطق فازی نوع ۲، ناوبری خودکار وسیله نقلیه انجام شده است.
شبیه سازی ناوبری اتوماتیک خودرو با منطق فازی در متلب
توسط متخصصان گروه پروماد انجام شده است.فایلهای نرم افزاری پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.