

توضیحات
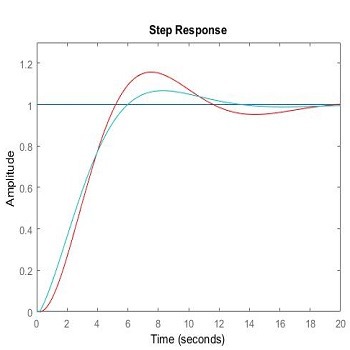
شبیه سازی کنترل سرعت موتور با استفاده از جبران ساز تاخیر و PID با متلب
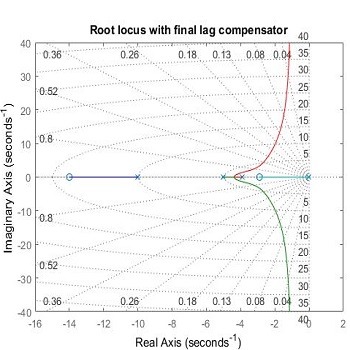
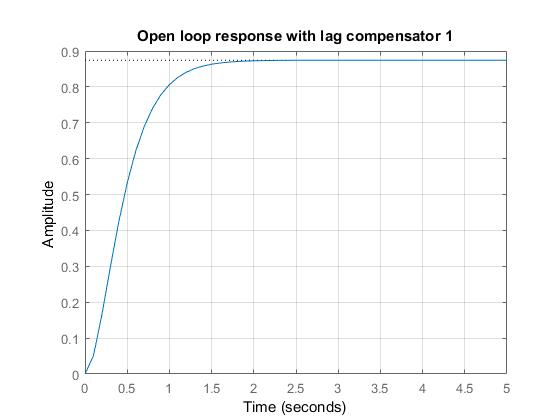
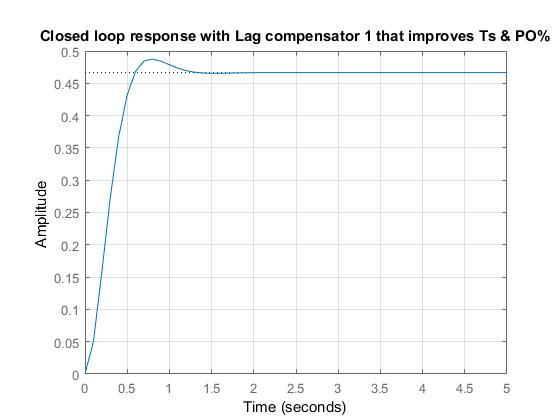
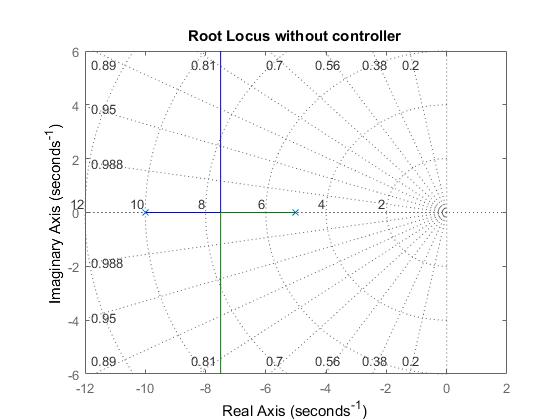
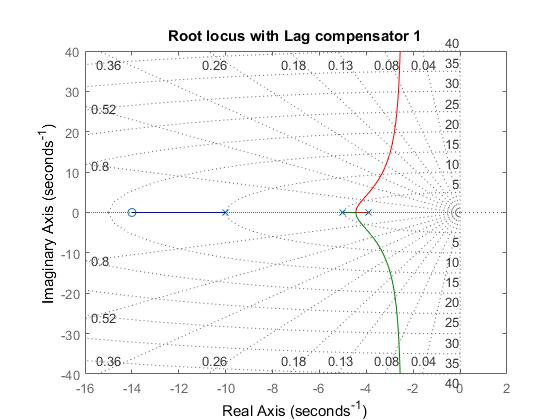
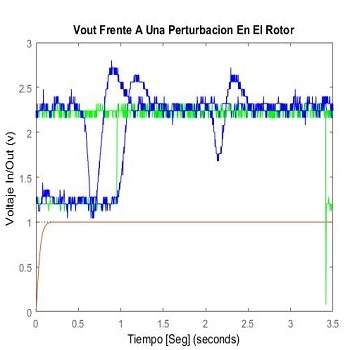
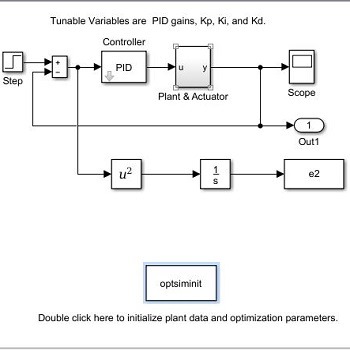
پروژه متلب زیر شامل کد و مثال های متلب است که برای کنترل سرعت موتور dc با جبران تاخیر و pid مورد استفاده قرار می گیرد. کنترل سرعت موتور با استفاده از جبران تاخیر و PID، برای شخصی سازی این کد کافی است: ۱- مقادیر ثابتهای موتور DC را تغییر دهید ۲- تعیین زمان نشست ، PO٪ و SSE و تغییر صفر جبران تاخیر ۳- تنظیم PID کنترل کننده
جبران کننده تأخیر یک مؤلفه در یک سیستم کنترل است که یک پاسخ فرکانس نامطلوب را در یک سیستم بازخورد و کنترل بهبود می بخشد. این یک تئوری اساسی در تئوری کنترل کلاسیک است.
جبران کننده های تأخیر تأثیر زیادی در رشته های رباتیک ، کنترل ماهواره ، تشخیص خودرو ، صفحه نمایش LCD و تثبیت فرکانس لیزر دارد. آنها یک ساختمان مهم در سیستم های کنترل آنالوگ هستند و می توانند در کنترل دیجیتال نیز مورد استفاده قرار گیرند.
با توجه به کارخانه کنترل ، مشخصات مورد نظر را می توان با استفاده از جبران کننده ها بدست آورد. I، D، PI، PD و PID ، کنترل کننده هایی را برای بهبود پارامترهای سیستم به کار می گیرم (مانند کاهش خطای حالت پایدار ، کاهش اوج رزونانس ، بهبود پاسخ سیستم با کاهش زمان افزایش). همه این عملیات ها توسط جبران کننده ها نیز قابل استفاده هستند که در تکنیک جبران کاسکد استفاده می شوند.(منبع)
شبیه سازی کنترل سرعت موتور DC با متلب توسط متخصصان گروه پروماد انجام شده است.فایلهای نرم افزاری پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.